The Panthera-HT project was born from a desire to make high-performance joint-motor
robotic arms accessible to students at a lower price.
Its predecessor, the Panthera robotic arm, was a 6-axis gripper arm based on DM
actuators. The initial concept was proposed by wEch1ng (https://github.com/wEch1ng),
who collaborated with KelvinLauMiau to share responsibilities in design, implementation,
debugging, and hardware validation, ultimately completing and open-sourcing the Panthera
arm.
The original authors later joined forces with HighTorque Robotics, and with HighTorque's support, the project was refined and commercialized as Panthera-HT — a more complete maker product. We remain committed to open-source principles with no restrictions on the project.

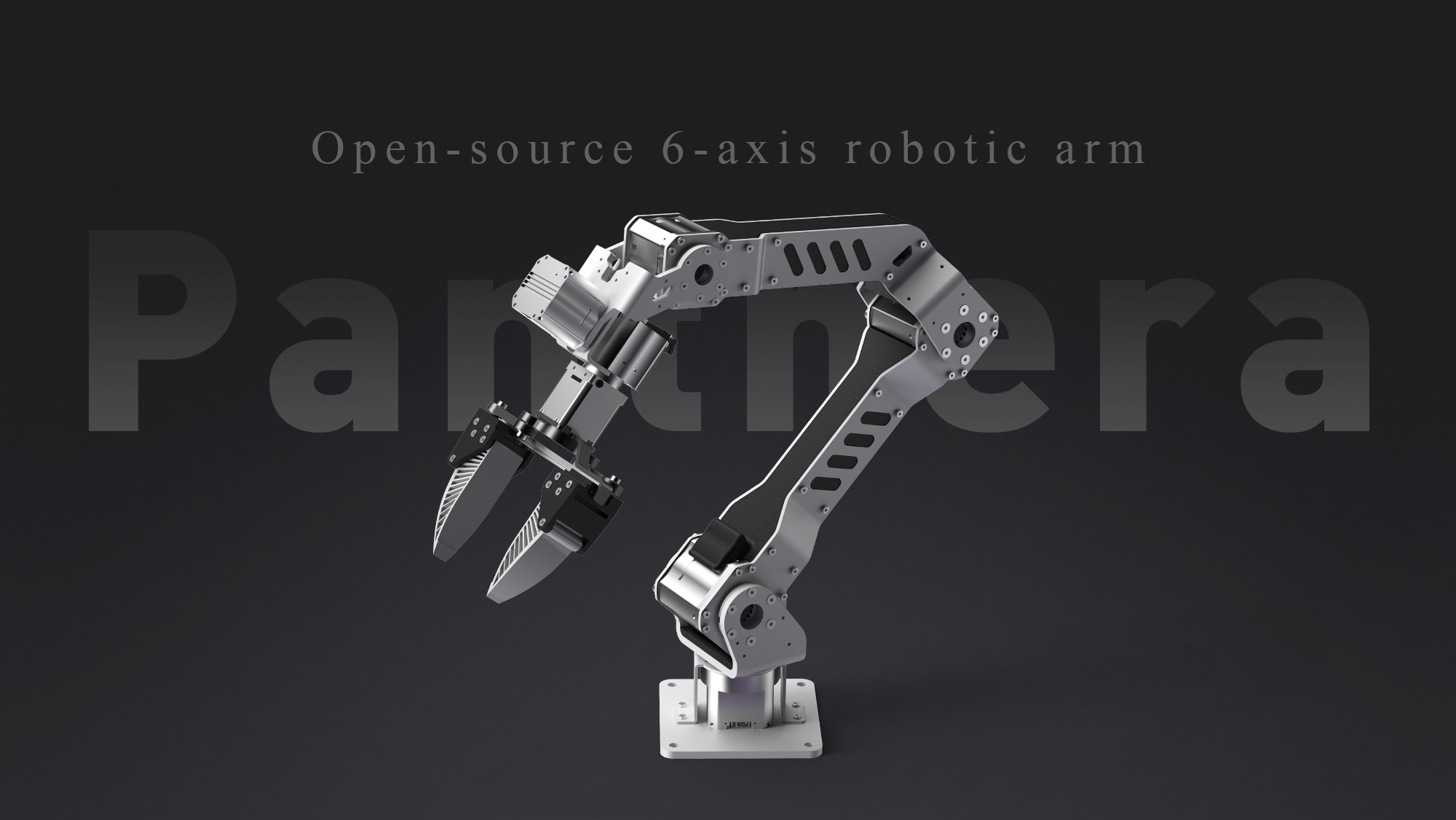
Leveraging motion control algorithms and high-precision sensing, the arm achieves 0.1mm repeatability — delivering greater stability and accuracy for alignment, grasping, and continuous trajectory tasks.

A lightweight 6-axis design combined with an 860mm extended reach delivers greater spatial coverage, allowing the arm to move freely and fluidly even in complex environments.

The overall design balances aesthetic consistency with structural integrity. The aluminum alloy body combines good looks, strength, and durability for long-term reliable use.

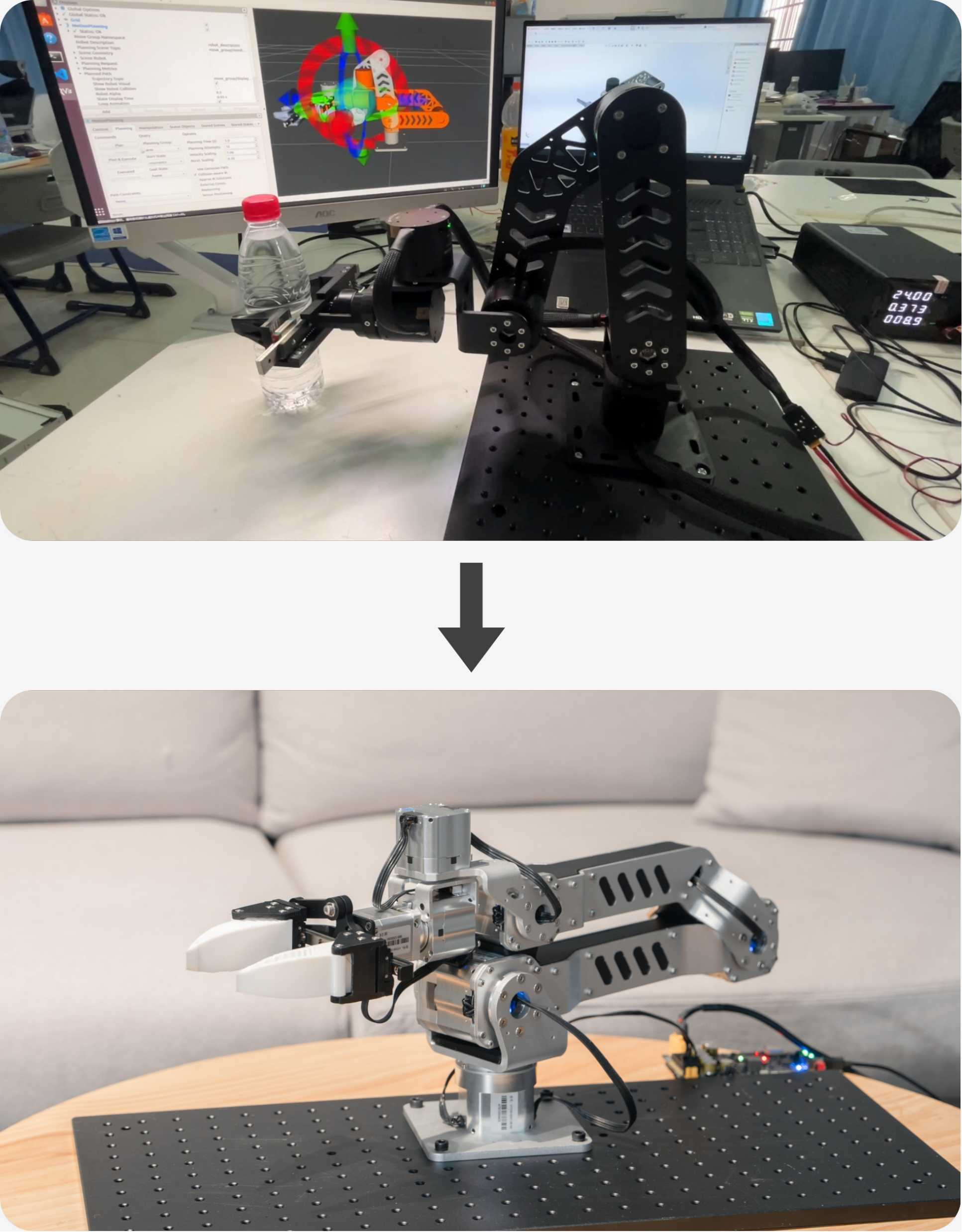
Compatible with ROS2 and LeRobot, supporting C++ and Python development. URDF models and simulation support are included, making it easy to get started with research, education, and custom development.